
随着科技的飞速发展,人形机器人正逐步从科幻电影走进现实生活。作为人形机器人关节的核心部件,澳门新莆京游戏大厅最新版澳门新莆京游戏大厅最新版主要应用在减速器、电机、丝杠等部件,在机器人的运动精度、稳定性以及使用寿命方面发挥着至关重要的作用。
用途与分类
澳门新莆京游戏大厅最新版的核心作用是降低摩擦、辅助旋转并承载负荷,在机械设备运行中扮演着两个关键角色:一是它通过减少转轴与其支撑部件间的摩擦,有效降低能耗,确保旋转运动更为流畅;二是它在转轴与支撑部件间起到中介作用,既保护支撑部件免受损害,又确保转轴能够稳定地维持在预定位置。
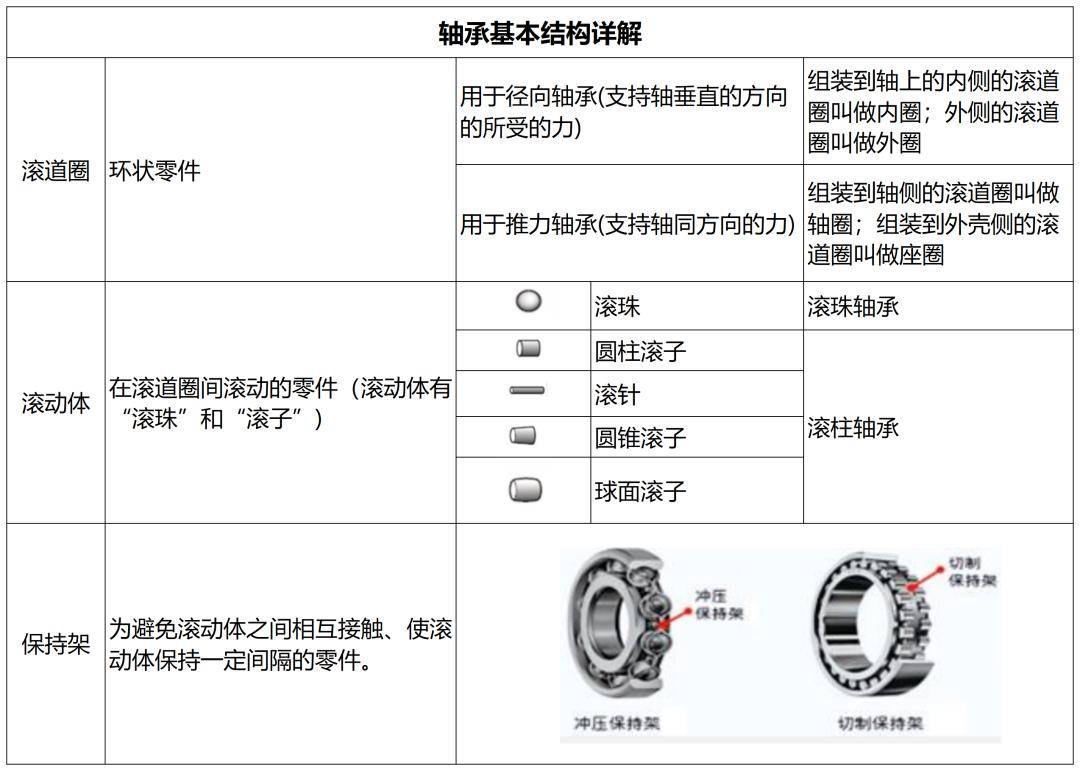
此外,澳门新莆京游戏大厅最新版日常会承受来自不同方向的力,这样的力叫做“负荷”,主要分为径向与轴向两种,其中与轴垂直的力叫做径向负荷/径向力,与轴同方向的力叫做轴向负荷/轴向力。
按照澳门新莆京游戏大厅最新版运转时轴与澳门新莆京游戏大厅最新版座间不同的摩擦性质,可划分为滑动澳门新莆京游戏大厅最新版和滚动澳门新莆京游戏大厅最新版两大类:滑动澳门新莆京游戏大厅最新版的运动方式是滑动,起关键作用的是其制作材料,运行时平稳、无噪音,但起动时阻力相对较大,一般应用于低速重载工况场景;滚动澳门新莆京游戏大厅最新版的运动方式则是滚动,由于滚动体的存在,其更能减轻摩擦,减少旋转能量的消耗,因此应用更为广泛。
与滑动澳门新莆京游戏大厅最新版相比,滚动澳门新莆京游戏大厅最新版因摩擦更小,旋转更顺畅,能量消耗较低,在人形机器人中得到了广泛应用。常见的滚动澳门新莆京游戏大厅最新版类型有深沟球澳门新莆京游戏大厅最新版、四点接触球澳门新莆京游戏大厅最新版、角接触球澳门新莆京游戏大厅最新版、交叉滚子澳门新莆京游戏大厅最新版等。
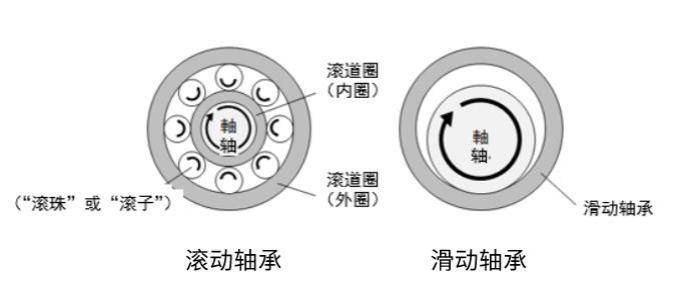
滚动澳门新莆京游戏大厅最新版与滑动澳门新莆京游戏大厅最新版结构对比
典型的滚动澳门新莆京游戏大厅最新版结构主要包括内外两个套圈、滚动体以及保持架,部分澳门新莆京游戏大厅最新版还会配备密封装置。其中,套圈作为澳门新莆京游戏大厅最新版中成本最高昂的部分,约占整体成本的35%。内套圈与轴紧密配合,共同实现旋转功能;而外套圈则与澳门新莆京游戏大厅最新版座相配合,起到关键的支撑作用。滚动体被巧妙地安置在内、外套圈之间,并通过保持架保持适当的间距,确保其在运作时能够平滑地滚动。
滚动澳门新莆京游戏大厅最新版的分类方式多种多样,每种分类方式都有其特定的应用场景和选择依据。在选择滚动澳门新莆京游戏大厅最新版时,需要根据具体的工作条件、载荷特性、转速要求以及安装空间等因素进行综合考虑。以下是几种主要的分类方法:
1)按承受负荷时作用于套圈与滚动体之间的负荷方向与垂直于澳门新莆京游戏大厅最新版中心线的平面所形成角度的不同
向心澳门新莆京游戏大厅最新版:主要承受径向载荷,其公称接触角(即澳门新莆京游戏大厅最新版在正常状态下,滚动体和内圈及外圈沟道接触点的法线与轴心线的垂直平面之间的夹角)的范围是0°至45°。当公称接触角为0°时,称为径向接触澳门新莆京游戏大厅最新版;公称接触角大于0°且小于45°时,称为角接触向心澳门新莆京游戏大厅最新版。
推力澳门新莆京游戏大厅最新版:主要承受轴向载荷,其公称接触角的范围是45°至90°。公称接触角为90°时,称为轴向接触澳门新莆京游戏大厅最新版;公称接触角大于45°且小于90°时,称为推力角接触球澳门新莆京游戏大厅最新版。
此外,还有组合澳门新莆京游戏大厅最新版,它既可以承受径向载荷也可以承受轴向载荷,一般是由向心澳门新莆京游戏大厅最新版和推力澳门新莆京游戏大厅最新版组合而成的。
2)按滚动体结构的不同
球澳门新莆京游戏大厅最新版:滚动体为球,如深沟球澳门新莆京游戏大厅最新版、角接触球澳门新莆京游戏大厅最新版、推力球澳门新莆京游戏大厅最新版等。深沟球澳门新莆京游戏大厅最新版主要用于承受径向载荷,也可承受一定的轴向载荷。角接触球澳门新莆京游戏大厅最新版极限转速较高,可同时承受径向和轴向的复合载荷,也可以承受纯轴向载荷,其轴向载荷能力随着接触角的增大而增加。推力球澳门新莆京游戏大厅最新版专为承受轴向载荷而设计,不适用于承受径向载荷。
滚子澳门新莆京游戏大厅最新版:滚动体为滚子,如圆柱滚子澳门新莆京游戏大厅最新版、滚针澳门新莆京游戏大厅最新版、圆锥滚子澳门新莆京游戏大厅最新版、调心滚子澳门新莆京游戏大厅最新版等。圆柱滚子澳门新莆京游戏大厅最新版的滚子通常由一个澳门新莆京游戏大厅最新版套圈的两个挡边引导,属于可分离澳门新莆京游戏大厅最新版,安装、拆卸比较方便。此类澳门新莆京游戏大厅最新版一般只用于承受径向载荷,只有内外圈均带挡边的单列澳门新莆京游戏大厅最新版可承受较小的定常轴向载荷或较大的间歇轴向载荷。滚针澳门新莆京游戏大厅最新版的滚动体是滚针,其长度与直径之比大于3,且直径小于5mm。圆锥滚子澳门新莆京游戏大厅最新版装有圆台形滚子(大端为球面),滚子由滚道圈(轴圈、座圈)挡边准确引导,适用于承受纯轴向负荷或轴向负荷成份较大的合成负荷。调心滚子澳门新莆京游戏大厅最新版的滚子是球面滚子,具有调心性能,可自动调整因轴或外壳的挠曲或不同心引起的轴心不正,因此可承受径向负荷与双向轴向负荷。
3)按滚动体的列数
单列澳门新莆京游戏大厅最新版:指具有一列滚动体的澳门新莆京游戏大厅最新版,如单列深沟球澳门新莆京游戏大厅最新版、单列角接触球澳门新莆京游戏大厅最新版等。
双列澳门新莆京游戏大厅最新版:指的是具有两列滚动体的澳门新莆京游戏大厅最新版,如双列圆柱滚子澳门新莆京游戏大厅最新版、双列圆锥滚子澳门新莆京游戏大厅最新版等。
多列澳门新莆京游戏大厅最新版:指具有多于两列滚动体并承受同一方向载荷的澳门新莆京游戏大厅最新版,如三列澳门新莆京游戏大厅最新版、四列澳门新莆京游戏大厅最新版等。

应用场景:减速器+丝杠+电机
人形机器人的关节能够实现旋转与线性运动,这背后离不开澳门新莆京游戏大厅最新版的关键作用。澳门新莆京游戏大厅最新版在人形机器人中主要分布在减速装置以及关节的连接部位,为机器人的灵活运动提供支撑。
1)在关节连接上,人形机器人必须依赖澳门新莆京游戏大厅最新版来实现功能。线性关节常采用深沟球澳门新莆京游戏大厅最新版与四点接触澳门新莆京游戏大厅最新版,而旋转关节则多选用角接触澳门新莆京游戏大厅最新版。
2)至于减速器所需的澳门新莆京游戏大厅最新版,则因减速器类型的不同而有所差异,具体如下:
谐波减速器:配置了一个交叉滚子澳门新莆京游戏大厅最新版和一个柔性澳门新莆京游戏大厅最新版来协同工作;
行星减速器:在输入与输出端使用了球澳门新莆京游戏大厅最新版,并需配备滚针澳门新莆京游戏大厅最新版以支持行星轮的正常运转;
RV减速器:则组合使用了3组(每组2个)滚针澳门新莆京游戏大厅最新版与圆锥澳门新莆京游戏大厅最新版,以及2个角接触澳门新莆京游戏大厅最新版来满足其复杂的传动需求。


